Lecture5: Learning 1
Machine Learning¶
-
How to build computers that:
- (automatically) imporve their performance (\(P\))
- at some task \((T)\)
- with experience \((E)\)
-
Statistical Learning
- Neural Learning
Framework¶
An Example: Spam Filtering¶
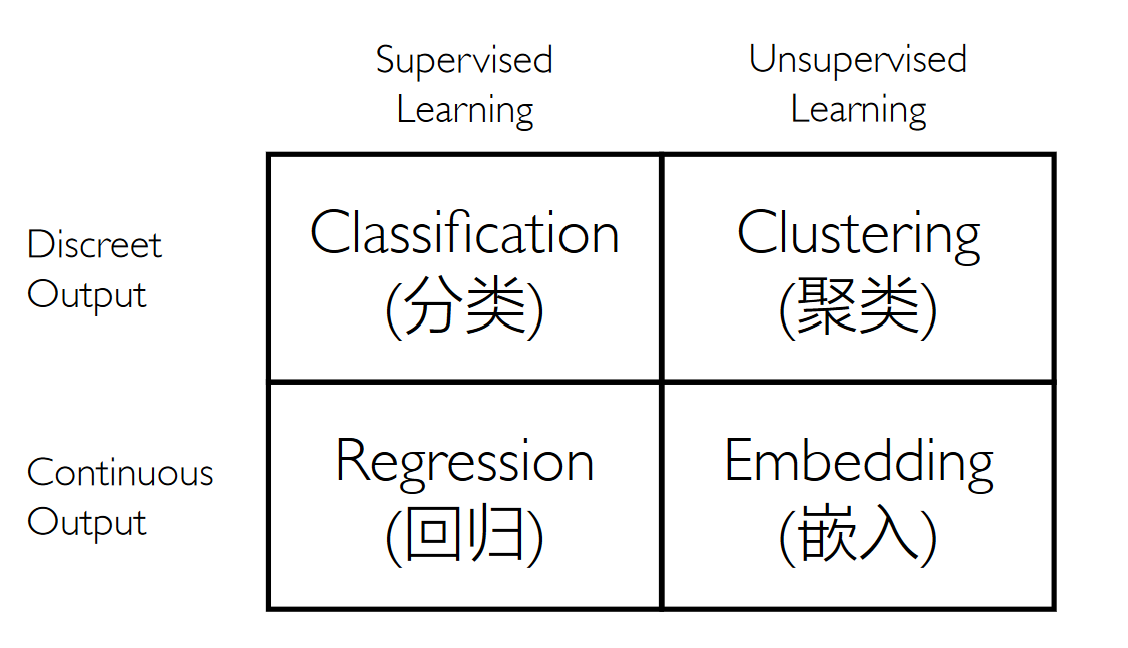
Task: binary classification
Feature extraction: by hand or learn features automatically.
Components of Learning¶
- Input: \(x \in R^d\)
- Output: \(y = \{0, 1\}\)
- Target function: \(f: \mathcal{X} \to \mathcal{Y}\)
- Data: \((x_1,y_1) \cdots (x_N,y_N)\)
- Hypothesis: "Possible function to be used for prediction"

Hypothesis Space¶
- Includes only those functions that have desired regularity.
- Continuity
- Smoothness
- Simplicity
linear !
Loss Function¶
L2 Loss: Regression
\[ l(y,h(x)) = (y - h(x))^2 \]
Classification Loss:
\[ l(y,h(x)) = 1[y \neq h(x)] \]
The canonical training procedure of machine learning:
\[ \hat{\epsilon}(h) = \min_{\theta} \sum_{ i =1}^m l(h_\theta(x_i), y_i) \]
- The main questions
- What is the hypothesis function?
- What is the loss function?
- How do we solve the training problem?
Maching Learning Scenarios¶
- Under fitting
- Approximate fitting
- Over fitting
Reinforcement Learning¶
Evaluation Metrics¶
Classicication¶
- Precision \(\frac{TP}{TP + FP}\) : How many selected items are relevant
- "查准率"
- Search Engine
- Recall \(\frac{TP}{TP + FN}\): How many relevant items are selected
- "查全率"
- Accuaracy \(\frac{TP + TN}{TP + TN + FP + FN}\): How many items are hit
F_1-score:
\[ \frac{1}{F} = \frac{1}{2} (\frac{1}{p} + \frac{1}{R}) \]
Confusion Matrix
from sklearn.metrics import confusion_matrix
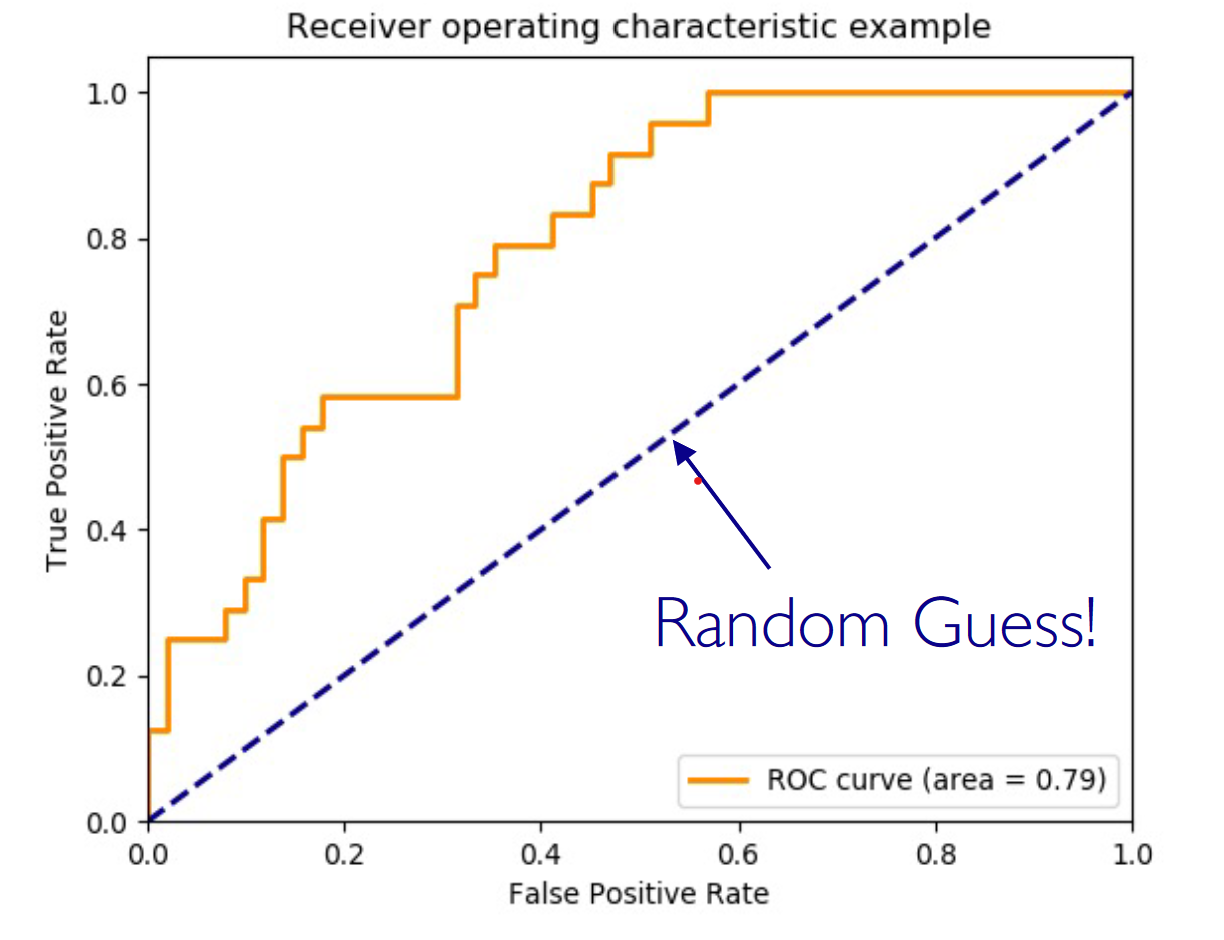
ROC (Receiver Operating Characteristic)
AUC (Area Under the Curve)
Regression Error¶
- Squared Error: MSE
- Absolute Error: MAE
Model Selection¶
Training and Test Data¶

The learning algorithms should never ever have access to test data
Cross Validation¶
- 5-fold cross validation
Model Selection: Whole Procedure¶
- Combined Algorithm Selection & Hyperparameter optimization problem
AutoML !
The complexity is too high ?
Tuner!!!!
K-Nearest Neighbors (KNN)¶
Geometric View¶
- Assumption: Closer points in feature space have similar semantics
The Effect of K¶
- Increasing \(k\) simplifies the decision boundary
- Smooth
No parameter to learn in KNN, it is a non-parameter model.
Feature Normalization¶
- Z-score normalization
Linear Regression¶
What Model to Choose¶
- Exploratory Data Analysis to ease model selection
Hypothesis Space¶
Loss Function¶
- L2 Loss
Optimization¶
- For general differentiable loss function, use Gradient Descent (GD)
- SGD : minibatch
The complexity of computing analytic Solution is too high.
Normalization¶
Basis Function¶
- Polynomial basis functions
- Radial basis functions (RBF)
Regularization¶
Question
Overfitting
Solution: Control norm of \(w\)
L2-Regularization
\[ penalty = \lambda ||w||_2^2 \]
- Smooth Solution
L1-Regularization
\[ penalty = \lambda ||w||_1\]
- Sparse Solution